O Movimento De Translação Consiste Na
O movimento de translação consiste na mudança de posição de um corpo no espaço, mantendo invariáveis sua orientação e forma ao longo do percurso. Este artigo explica, de forma clara e detalhada, como descrever, analisar e aplicar esse tipo de movimento em contextos físicos e geométricos.
Visão Geral do Movimento de Translação
Na física e na geometria, o movimento de translação é um dos tipos mais fundamentais de deslocamento de corpos. Diferentemente da rotação, na translação todos os pontos do objeto seguem trajetórias paralelas e idênticas, ou seja, o corpo como um todo avança na mesma direção e sentido, sem girar nem deformar.
Para caracterizar esse movimento, utilizamos vetores de deslocamento, que indicam tanto a direção quanto a magnitude do caminho percorrido. A velocidade média e a aceleração também são calculadas considerando-se que todos os pontos do corpo têm as mesmas variações de posição ao longo do tempo.

Passo a Passo para Descrever o Movimento de Translação
- Identifique o corpo em estudo: Defina claramente qual é o objeto que se desloca. Isso pode ser um ponto material, um veículo, uma partícula ou qualquer sistema rigidez considerada como um todo.
- Determine o sistema de referência: Escolha um referencial (inercial ou não inercial) a partir do qual as posições serão medidas. O referencial precisa ser consistente ao longo de todo o cálculo.
- Marque a posição inicial: Registre as coordenadas do corpo no instante inicial \( t_0 \), representadas por \( \vec{r}_0 \) ou \( (x_0, y_0, z_0) \).
- Registre a posição final: Anote as coordenadas do corpo no instante posterior \( t \), representadas por \( \vec{r} \) ou \( (x, y, z) \).
- Calcule o vetor deslocamento: O vetor translação \( \vec{d} \) é dado por \( \vec{d} = \vec{r} - \vec{r}_0 \). Esse vetor aponta da posição inicial para a posição final e contém toda a informação sobre o movimento.
- Analise as trajetórias: Em translação, as trajetórias de todos os pontos são paralelas. Se um ponto descreve uma linha reta, todos os outros também descrevem retas paralelas; se descreve uma curva, todas as curvas são cópias deslocadas uma da outra.
- Determine as grandezas cinemáticas:
- Velocidade média: \( \vec{v}_{m} = \frac{\vec{d}}{\Delta t} \).
- Velocidade instantânea: \( \vec{v} = \lim_{\Delta t \to 0} \frac{\vec{d}}{\Delta t} = \frac{d\vec{r}}{dt} \).
- Aceleração: \( \vec{a} = \frac{\Delta \vec{v}}{\Delta t} \), que também é a mesma para todos os pontos do corpo.
- Generalize para trajetórias curvas: Mesmo em curvas, se o corpo não gira, pode-se decompor o movimento em pequenos deslocamentos lineares ao longo da trajetória, aplicando as mesmas regras de translação.
Movimento de Translação no Contexto Geométrico
Na geometria, o movimento de translação é uma transformação isométrica que desloca todos os pontos de uma figura ou espaço por uma mesma direção e distância. Essa transformação preserva distâncias, ângulos, áreas e volumes, sendo classificada como uma das isometrias diretas do plano e do espaço.
Propriedades Fundamentais
- Invariância de vetores: Qualquer vetador livre é preservado em uma translação; apenas sua posição muda.
- Composição de translações: A composição de duas translações é outra translação, cujo vetor resultante é a soma vetorial dos vetores individuais.
- Translação e eixos: Se o vetor deslocamento é paralelo a um eixo coordenado, a figura se move apenas ao longo daquela direção, facilitando os cálculos.
- Inversa da translação: A translação inversa é obtida usando o vetor oposto, voltando a figura à posição original.
Ferramentas e Requisitos para Análise
- Sistema de coordenadas: Cartesiano (x, y, z) é o mais comum, mas podem ser usados outros sistemas conforme o problema.
- Representação vetorial: Utilize vetores posição e vetores deslocamento para formalizar o movimento.
- Equações paramétricas: Para trajetórias no tempo, use \( x(t) = x_0 + v_x t \), \( y(t) = y_0 + v_y t \), \( z(t) = z_0 + v_z t \), válidas quando a velocidade é constante.
- Gráficos de posição-tempo: Em uma dimensão, o gráfico da posição em função do tempo é uma reta com inclensão igual à velocidade.
- Software de cálculo: Ferramentas como planilhas eletrônicas, Python (com NumPy e Matplotlib) ou sistemas de álgebra computacional ajudam a simular e visualizar trajetórias.
- Unidades e escalas: Mantenha unidades consistentes (metros, segundos) e defina a escala do referencial para evitar erros de interpretação.
Erros Comuns e Como Evitá-los
- Confundir translação com rotação: Na translação, não há mudança nos ângulos ou na orientação do corpo; se houver rotação, o movimento não é puramente translacional.
- Ignorar a direção do vetor deslocamento: O vetor deslocamento deve ser calculado como a diferença entre as posições finais e iniciais, respeitando a ordem: \( \vec{r} - \vec{r}_0 \).
- Usar referenciais móveis sem ajustar as medidas: Se o referenciar for acelerado, forneça uma correção de inércia; em referenciais não-inerciais, forças fictícias aparecem.
- Suponher que todos os corpos transladam da mesma forma: Cada corpo pode ter diferentes trajetórias, mas, dentro de um mesmo corpo, todos os pontos têm o mesmo vetor deslocamento em translação rigida.
- Erro de arredondamento em cálculos numéricos: Em simulações, use precisão adequada e valide os resultados com métodos analíticos quando possível.
- Não verificar a consistência das unidades: Assegure-se de que todas as grandezas estejam nas mesmas unidades antes de fazer operações.
Dica Prática
Para treinar, pegue um objeto do cotidiano, como uma caneta, e descreva o caminho dela ao ser empurrada sobre uma mesa reta. Meça as posições inicial e final, calcule o vetor deslocamento e determine a velocidade média. Repita o experimento em trajetórias curvas para internalizar o conceito de que, mesmo seguindo curvas, o movimento pode ser decomosto em pequenos deslocamentos lineares de translação.
Perguntas Frequentes
O movimento de translação pode ser curvilíneo?
Sim, o movimento de translação pode ser curvilíneo. O requisito fundamental é que todos os pontos do corpo sigam trajetórias paralelas, mesmo que sejam curvas. Nesse caso, a direção do vetor velocidade muda ao longo do caminho, mas o corpo não gira nem sofre torsão.
Como diferenciar translação de rotação em problemas práticos?
Na translação, a orientação do corpo permanece constante; já na rotação, pontos diferentes do corpo têm velocidades e trajetórias distintas em torno de um eixo. Se você vê um objeto girando, ele não está em translação pura.
O movimento de translação é sempre uniforme?
O movimento de translação pode ser uniforme ou não uniforme. Na translação uniforme, a velocidade é constante; na translação não uniforme, há aceleração. O que define o tipo de translação é a variação da velocidade ao longo do tempo.
É possível que um corpo rote e translate simultaneamente?
Sim, é comum um corpo apresentar rotação e translação ao mesmo tempo, como uma roda que rola sem escorregar. Nesse caso, o movimento é uma combinação de translação do centro de massa e rotação em torno desse ponto.

Como calcular a aceleração em translação não uniforme?
A aceleração em translação não uniforme é calculada como a derivada da velocidade em relação ao tempo, ou a segunda derivada da posição: \( \vec{a} = \frac{d\vec{v}}{dt} = \frac{d^2\vec{r}}{dt^2} \). Se o deslocamento for conhecido como função do tempo, basta aplicar diferenciação.
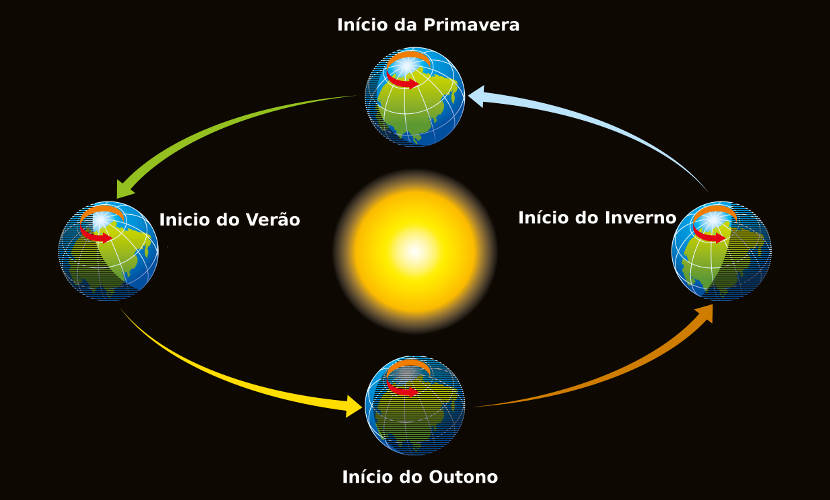
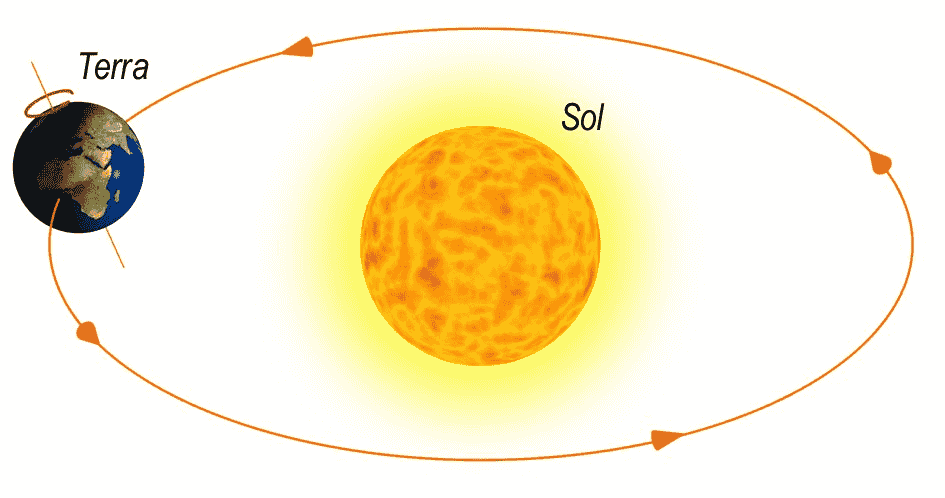
Estações do ano e o movimento de Translação - Quais as Relações?
Você sabe porque as Estações do Ano existem? E suas relações com o movimento de translação? Entenda isso agora! Estações ...
